Laser Scanner 3D – Técnicas de medição com LS3D Estático – parte 1
O desenvolvimento dos equipamentos de Laser Scanner 3D (LS3D) Terrestres vem buscando cada vez mais a produtividade. Quando falamos em produtividade não estamos apenas falando da quantidade de pontos por segundo ou do seu alcance em metros. Estamos falando também do método de medição, que dependendo da aplicação passa a ser peça fundamental na produtividade por causa das limitações ou facilidades de cada campo de atuação.
Lembramos que nas edições anteriores vimos que o levantamento com LS3D Estático é composto por cenas e estas através de pontos em comum devem ser unidas para compor uma única nuvem de pontos, compondo o registro da cena.
Veremos então os métodos de levantamento que permitem registrar as cenas:
POLIGONAL SCANNER
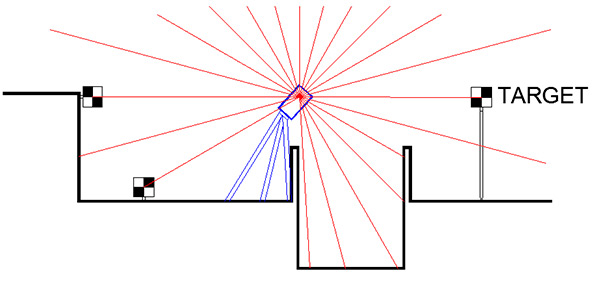
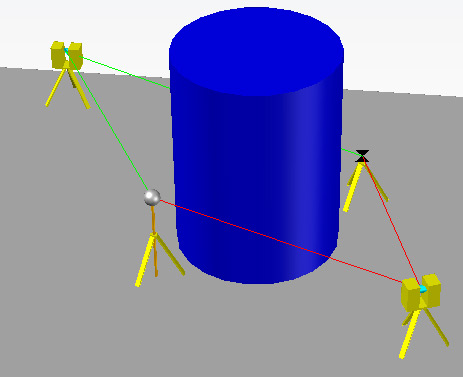
Similar ao procedimento de poligonal com uma estação total, o LS3D exige que ele esteja calado e centrado sobre um ponto coordenado e faça uma orientação a um ponto a ré, também coordenado ou com um azimute conhecido. A medição neste ponto à ré é feita utilizando um target. Desta forma, todos os pontos da nuvem de pontos estarão sendo medidos no sistema de coordenadas especificado. Feita a medição da nuvem de pontos, parte-se para a medição de um ponto à vante, também utilizando um target. O ponto à vante deve ser devidamente materializado que permita a futura ocupação do LS3D. O procedimento se repete com as cenas sequentes até que seja ocupado um ponto coordenado com o LS3D, realizando a visada à vante num outro ponto coordenado.
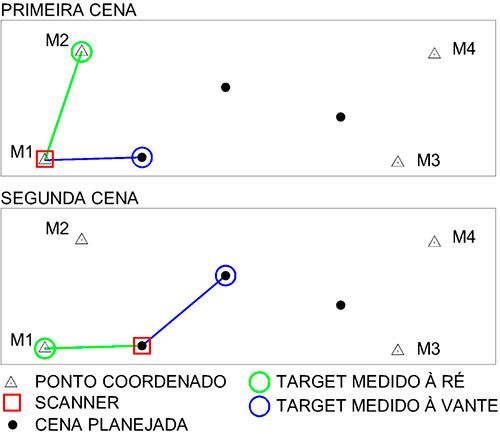
PRIMEIRA CENA
Em campo é realizado o processamento preliminar em tempo real onde as nuvens de pontos de cada cena estarão num mesmo sistema de coordenadas, sendo possível até mesmo analisar a nuvem completa. No escritório é realizado o registro das cenas onde o erro encontrado na poligonal é então ajustado e são recalculadas as coordenadas dos pontos que compõem a nuvem de pontos, agora devidamente ajustados à poligonal.
É necessário que os targets e o próprio LS3D tenham dispositivos que possibilitem a centragem sobre pontos materializados em campo, como base nivelante com prumo (ótico ou laser) ou bastões. Como estamos falando de dados 3D, obrigatoriamente a altura do LS3D e dos dispositivos de visada devem ser medidos em campo.
Para que o LS3D permita este método, ele deve ser munido de compensador angular, pois ele terá apenas uma orientação para o ângulo de azimute.
Este método tem o inconveniente da obrigatoriedade de seguir uma sequência de cenas. É muito utilizado para levantamentos topográficos para infraestrutura, onde técnicos que já executam levantamentos com estações totais não terão dificuldades de adaptação à metodologia com LS3D.
SCANNER LIVRE
Este método permite que o LS3D seja colocado em qualquer lugar sem a necessidade de ocupar com o LS3D os pontos coordenados, nem os pontos onde foram medidos pelos targets. Porém a visada em pelo menos dois pontos coordenados com targets é obrigatória para que a nuvem fique no mesmo sistema de coordenadas dos pontos de referência. As cenas não necessitam ser intervisíveis, permitindo que seja escaneado locais de difícil acesso ou confinados, reduzindo o número de cenas.
Este método permite também que o LS3D trabalhe sem estar calado (sem compensador angular ou com ele desligado), sendo neste caso necessário três pontos coordenados e medidos com targets. Com o LS3D não calado, podemos colocá-lo em posição estratégica para escaneamento de locais de difícil acesso, como fossos, janelas, sacadas, passarelas, etc. Uma boa distribuição geométrica dos targets é FUNDAMENTAL para a qualidade do registro.